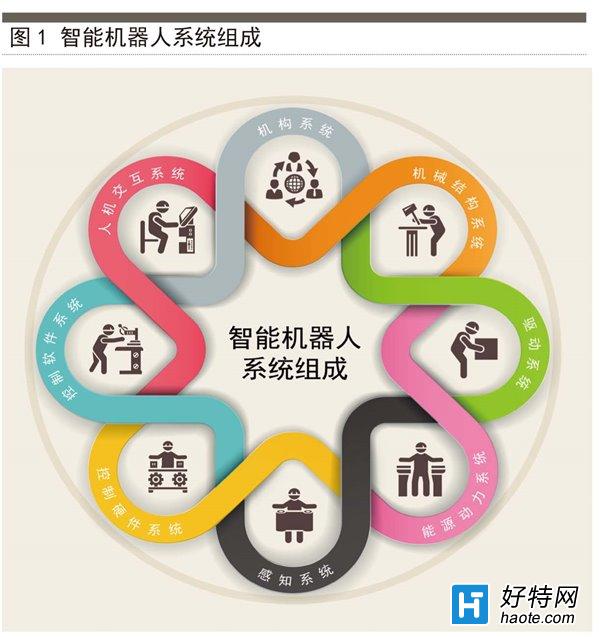
机器人核心部件包括伺服电机、减速器及控制器、驱动器及传感器。
谐波减速器一般用于轻型机器人或机器人腕部关节。
由波发生器、柔轮和钢轮组成,具有减速比大、齿隙小、精度高,零部件少、安装方便及体积小、重量轻等优点。目前,国际上谐波减速器市场几乎被日本Harmonic公司垄断,因此该公司具有定价权。
国内谐波减速器研究起步较早,如北京谐波传动技术研究所早在上世纪六、七十年代便开始了谐波减速器的研究。由于市场问题,该项研究进展较慢,但积累了较多的研发经验。近年来,国产谐波减速器开始迅速发展,国产谐波减速器开始在国产机器人产品上得到越来越多的应用。

RV减速器一般用于机器人的肩关节,用于传递较大的扭矩。
目前,该领域的国际市场也被日本的Nabtesco公司所垄断。国内在RV减速器制造的一些关键技术上还有待提高,比如,针孔壳要求确保数十个半圆孔的圆度及同心度。工业机器人的控制系统一般包括伺服层、主控层及操作层,其中伺服层包括伺服电机、驱动器等,主控层包括控制器、编码器、力传感器等。目前,国内机器人在伺服层和主控层的核心技术上均存在一定程度的制约。
控制系统方面,欧系机器人一般采用伦茨、博世力士乐等控制系统。
其具有过载能力强、动态响应好、驱动器开放性强等优点;但价格昂贵,日系机器人一般采用安川、松下、三菱等品牌的控制系统,相对欧系控制系统来说动态性能偏弱,但具有价格优势。近年,一些国产控制系统中也逐渐开始在工业机器人产品上得到应用。
总体来说,机器人理论及关键技术研究是我国工程领域长期面临的科学挑战,需要解决机器人与作业任务和环境的适应性、人机交互与自律协同控制、信息采集与传输机制等科学问题,突破减速器、感知驱动与控制等关键技术及核心部件等技术瓶颈,确保我国在下一轮机器人发展大潮中处于不败之地,机器人理论与关键技术研究是国家的重大战略需求。
小编推荐阅读